
 Documents of user Ecoimpact managers
Documents of user Ecoimpact managers
Авторы - менеджеры сервиса ECOIMPACT
Knowledge databases of user-
Ученые из Уганды и Великобритании выяснили, что масло кошачьей мяты может защищать от укусов комаров не хуже одного из самых распространенных химическ
-
За последние десятилетия число опасных погодных явлений в мире выросло в 3–4 раза, а в России, по данным Росгидромета, их количество увеличилось миним
-
Ключевой результат: Согласно исследованию, опубликованному в Lancet Planetary Health, изменение климата способствовало росту количества генов устойчи
-
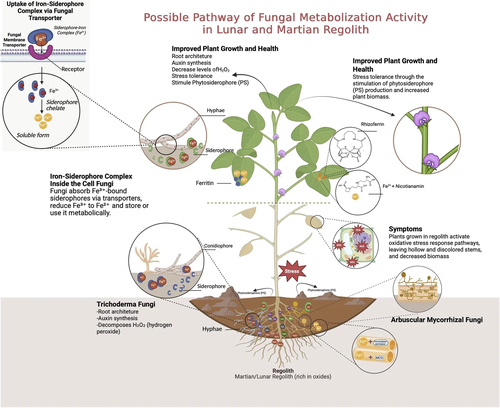
Суть: Ученые из США и Бразилии предложили использовать особые грибы (арбускулярные микоризные грибы и Trichoderma ) для превращения токсичного лунно
-
Новое исследование опровергает популярное представление о том, что один лишь запах хвойного леса способен улучшить работу мозга, снизить стресс или по
-
Сяочжай Тянькэн , расположенный в уезде Фэнцзе муниципалитета Чунцин, Китай, — это Самая глубокая и крупнейшая в мире карстовая воронка, известная к

-
Нидерландские ученые обнаружили в атмосфере высокие концентрации метилсилоксанов — силиконовых соединений из моторных масел, косметики и бытовой химии
-
Ссылка Глобальное потепление наносит серьезный экономический и экологический ущерб, и ООН предупреждает о риске необратимых последствий, если не дей
-
Ссылка Тефлон безопасен при нагреве до 260 °C, но если сковороду перегреть (забыть на огне на 10 минут), покрытие начинает выделять умеренно ток
-
Длительное вдыхание загрязненного воздуха может влиять на физическое развитие мозга в подростковом возрасте
-
Обсуждение показало, что времена, когда компании раздавали красивые, но расплывчатые обещания по климату, постепенно уходят в прошлое. На смену им приходит новый этап — более трезвый и практичный. Теперь бизнес все четче понимает: изменения климата уже происходят, и просто сокращать выбросы недостаточно. Нужно еще и учиться адаптироваться к этим изменениям.
-
Долговременное воздействие городского воздуха даже при относительно низком уровне загрязнения связано с более тяжелым поражением коронарных сосудов. К такому выводу пришли радиологи Университета Торонто.
-
Современные климатические модели выводят прогнозирование экстремальной погоды на новый уровень точности. Проект MESACLIP решает эту проблему, моделируя атмосферу и океан с детализацией до 10 км. Что предсказывают синоптики в будущем?

-
Исландия десятилетиями оставалась одним из немногих мест на планете, свободных от комаров. Этому способствовали экстремально холодные зимы и кратковременное лето. Однако в середине октября 2025 года в этой стране обнаружили первых комаров.
-
Идея охладить Землю, отражая солнечные лучи с помощью искусственных аэрозолей, из научной фантастики постепенно превратилась в предмет серьезных дискуссий. Метод, известный как стратосферный аэрозольный впрыск (SAI), сегодня активно рассматривается как временное средство борьбы с глобальным потеплением. Однако исследователи Колумбийского университета предупредили, что сторонники технологии недооценивают ее риски и технические сложности. Работа опубликована в журнале Scientific Reports (SR).
-
Люди не справляются со стрессом и перенаселенностью городов
-
В океанах при избытке CO₂ запускается цепная реакция. Планктон активно уносит углерод на дно, что делает углеродный цикл нестабильным и может привести к глобальному охлаждению.
-
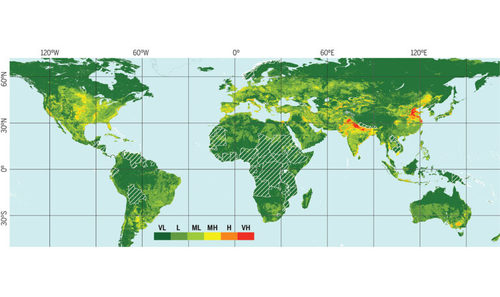
Ученые собрали данные более чем из двух сотен мест на территории 34 стран, где происходит проседание грунтов. Эти цифры помогли уточнить созданную испанскими геологами модель глобального изменения ландшафта в результате подобных процессов. Составленная карта заставляет задуматься: если темпы проседания почвы сохранятся, почти 12 миллионов квадратных километров суши окажутся ниже уровня моря.
-
Экологическая обстановка в этих городах находится под постоянным наблюдением международных организаций. И хотя страны предпринимают меры, многие мегаполисы по-прежнему входят в топ самых грязных городов на планете.
-
Ученые лаборатории исследования озонового слоя и верхней атмосферы СПбГУ, работающей в рамках программы мегагрантов Министерства науки и высшего образ
-
На первом этапе предполагается локальное повышение температуры на планете примерно на 30°C. Среди возможных методов — установка солнечных зеркал, распыление искусственных аэрозолей и покрытие поверхности специальными материалами, например, кремниевыми аэрогелями. Это может привести к таянию подповерхностного льда, появлению жидкой воды и запуску биологических процессов. Марсианская почва уже содержит питательные вещества, необходимые для зарождающихся экосистем.
-
Локальное ранение растений запускает сигналы, которые перемещаются локально внутри раненого листа или системно через сосудистую сеть к отдаленным листьям. Наше понимание механизмов инициирования и распространения этого повсеместного класса сигналов остается неполным. Здесь мы разрабатываем унифицированную структуру, основанную на пороэластичной динамике, для изучения двух связанных биофизических процессов — распространения изменений давления и передачи химических элиситоров через массовые потоки, вызванные этими изменениями давления — как потенциальных механизмов инициирования и распространения сигналов, вызванных ранением. Мы показываем, что быстрые изменения давления в ксилеме могут передавать механическую информацию по всему растению, в то время как их связь с соседней несосудистой тканью приводит к отеку и массовому потоку, которые могут транспортировать химические элиситоры к отдаленным листьям. Мы сопоставляем прогнозы нашей модели с измерениями динамики сигналов у нескольких видов, чтобы показать, что i) пороэластичная модель может улавливать наблюдаемую динамику чисто механических изменений (отек отдаленных листьев), вызванных ранением; ii) адвекция и диффузия гипотетических элиситоров с массовыми потоками, вызванными пороэластичными релаксациями, могут объяснить дистантные клеточные ответы, наблюдаемые с ген-кодируемыми репортерами концентрации цитозольного кальция и электрических сигналов; и iii) пороэластичная диффузия изменений давления вокруг локальных ран в неваскулярной ткани соответствует наблюдаемым цитозольным кальциевым сигналам и представляет собой альтернативную гипотезу относительно молекулярной диффузии химических элиситоров. Эта структура обеспечивает ценную основу для оценки механизмов передачи сигнала и для разработки будущих экспериментов по выяснению факторов, участвующих в инициировании сигнала, его распространении и выявлении цели.
-
Высшие растения — это сидячие организмы, которые воспринимают сигналы окружающей среды, такие как свет и химические сигналы, и реагируют на них изменением своей морфологии. Сигнальные пути используют сложную сеть взаимодействий для организации биохимических и физиологических реакций, таких как цветение, созревание плодов, прорастание, фотосинтетическая регуляция и развитие побегов или корней. На этом занятии обсуждались механизмы сигнальных систем, которые запускают реакции растений на свет и газообразный гормон этилен. Эти сигналы сначала воспринимаются рецептором и передаются в ядро с помощью сложной сети. Сигнал может передаваться в ядро любой из нескольких систем, включая связывающие белки ГТФ (G-белки), которые изменяют активность при связывании ГТФ; каскады протеинкиназ, которые последовательно фосфорилируют и активируют ряд белков; и ионные каналы мембраны, которые изменяют ионные характеристики клеток. Сигнал проявляется в ядре как изменение активности связывающих ДНК белков, которые являются факторами транскрипции, которые специфически взаимодействуют и модулируют регуляторные области генов. Таким образом, обнаружение сигнала окружающей среды передается через трансдукционный путь, а изменения в активности факторов транскрипции могут координировать изменения в экспрессии набора генов для управления новыми программами развития.
-
Растения — это сидячие децентрализованные системы без мозга или нервной системы, и очень мало известно о том, как они количественно оценивают внешние стимулы. Мы экспериментально исследуем зависимость гравитропных реакций колеоптилей пшеницы от наличия предыдущих стимулов, выявляя, как колеоптили интегрируют множественные стимулы с течением времени. Мы сообщаем о количественных доказательствах того, что растения эффективно реагируют не только на суммы стимулов, но и на различия между стимулами в различных временных масштабах. Это открытие расширяет наше понимание того, как растения взаимодействуют со своей средой, поскольку способность организмов вычитать стимулы с течением времени имеет решающее значение для сравнения сигналов и лежит в основе навигации и активного восприятия.
-
Американским исследователям удалось с помощью теории клеточных автоматов объяснить процессы регулирования потребления углекислого газа, который необходим для фотосинтеза. На поверхности листьев растений есть отверстия, называемые устьицами, которые открываются, чтобы впустить внутрь углекислый газ, и закрываются с целью предотвращения уноса воды из растений. Регулирование заключается в том, чтобы максимально закачать внутрь углекислый газ и потерять при этом минимум воды.
-
Ассоциации между траекториями загрязнения воздуха и когнитивными способностями в основном имеют форму перевернутой буквы J, при этом респонденты, подвергшиеся воздействию самых высоких уровней NO 2 и общего количества PM 2,5 в жилых помещениях, показали худшие результаты по глобальному когнитивному познанию (β = −.241; 95% ДИ = [−0,46, −0,02] и β = −.334; 95% ДИ = [−0,55, −0,12] соответственно), чем те, кто подвергся воздействию средних уровней загрязнения. Аналогичные ассоциации были также обнаружены для исполнительной функции и памяти (только PM 2,5 ), тогда как более убедительные доказательства зависимости «доза-реакция» были обнаружены для языка. Более высокие выбросы от сжигания в промышленности и жилых помещениях, а также сжигания биотоплива, угля, нефти и природного газа были связаны с худшими языковыми показателями.